Description:
Project Description
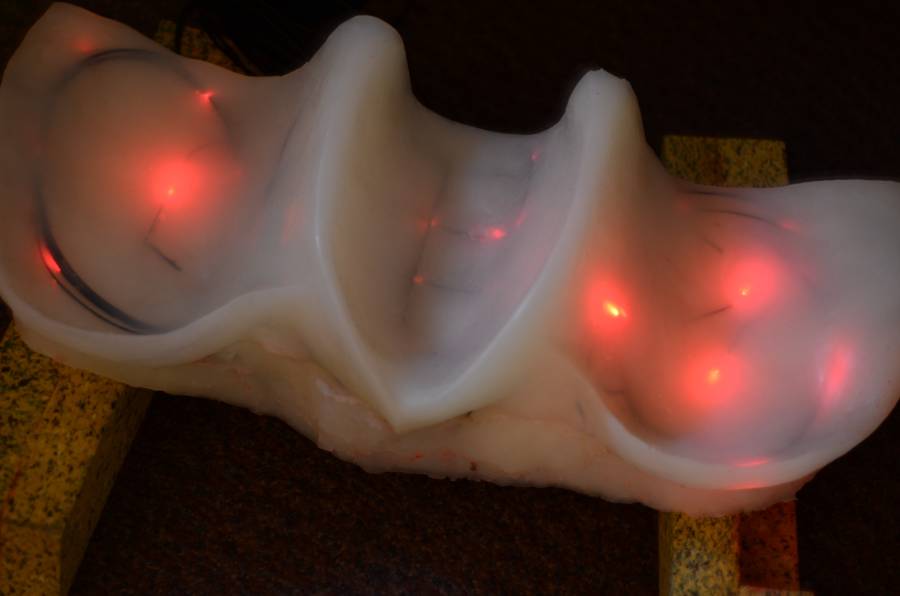
The Ballagumi is a silicone form embedded with fibre-optic sensors. It responds to deformations such as bending, twisting, prodding, and slapping holistically, as the flexible substrate ensures that a deformation in one local propagates to the rest of the instrument. Conceived as a controller for physical modelling synthesis, with its many intertwined sensors mapping on to the myriad parameters of a dynamical system.

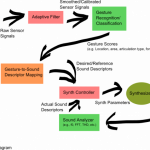
Mapping of deformation on to sound is a complex task, involving explicit mappings and gesture classification using machine learning techniques. The Ballagumi is currently being used to explore mapping and its interaction with performance gestures, with the goal of using it on the performance stage, in neuroscience studies, and for physical rehabilitation.

IDMIL Participants:
Research Areas:
Funding:
- Canada foundation for innovation
- Centre for Interdisciplinary Research in Music Media and Technology (CIRMMT)
- NSERC